Tuning Extended Kalman Filter Process Noise with Discriminant Training
TL;DR: Using Discriminative Training of Kalman Filters (2005) to your tune filter’s process noise.
I recently was asked about how you tune the noise covariance matrices for (Extended) Kalman Filters. It was a pointed question, where I felt obliged to have an answer, and while I had a good answer for the measurement noise $R$, I could only remember iteratively hand tuning $Q$ based on some educated guesses and perceived performance. I assumed there was a better answer, and I was embarrassed I didn’t have it, so I set out to find it.
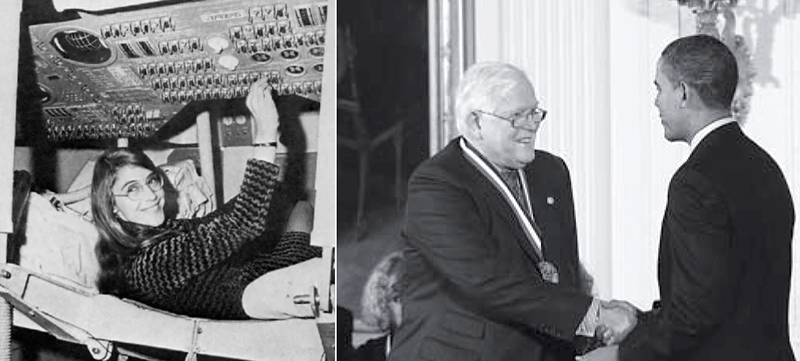
Right: Rudolf Kalman, inventor of the Kalman Filter, receives the National Medal of Science from President Obama. Left: Margaret Hamilton, one of the leading minds who developed the Apollo on-board flight software, sits in the Apollo module. The navigation system interface is above her head, below the circular attitude indicator, running Kalman’s filter.